



















71
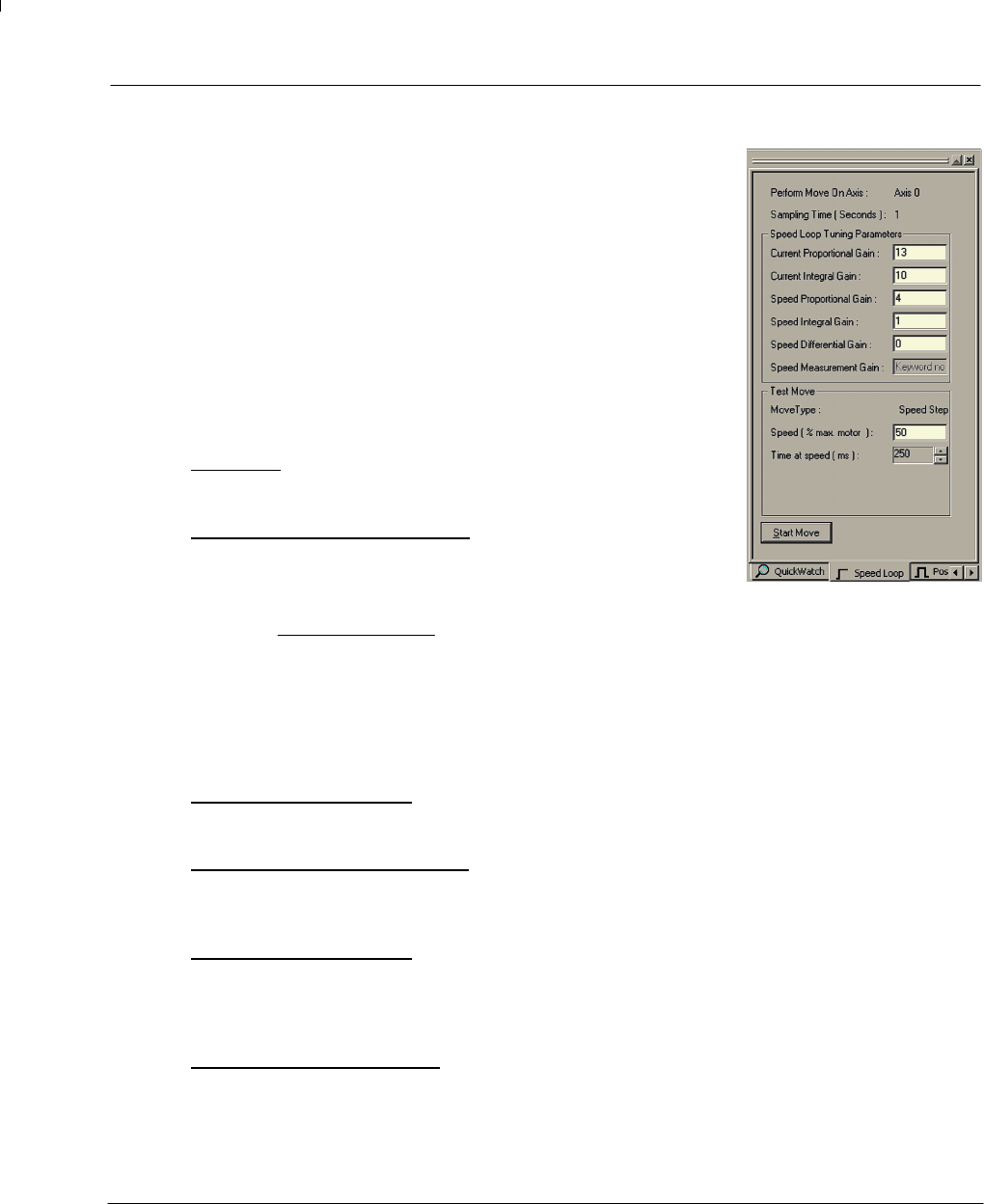
5.3.2 Speed Loop tab
The Speed Loop tab provides a further opportunity to tune the motor.
Click in the appropriate boxes and type the required values.
Click Start Move to perform the move.
The motor will now rotate, WorkBench will upload the recorded
(captured) data from the MintDrive and the Capture tab will be
shown.
Note: If an error occurs, the Error: button on the Motion toolbar
will show the error number. Click the button to see details
of the error. Depending on the type of error that occurred,
you might need to click the Clear Motion Errors button
before further moves can be performed.
Speed Step
performs a step speed change to the percentage of
maximum motor velocity entered in the Speed (% max motor) box.
Current Proportional Gain (KIPROP)
The gain is set by MCT during the tuning process. If you need to
recalculate this value, use the formula:
KIPROP =
740 × L ×
A∕V
VAC
where:
L = Line to neutral inductance of the motor in mH.
A/V = Amps / volt scaling of the current feedback.
VAC = Nominal line voltage
Current Integral Gain (KIINT)
This gain is preset to 50Hz and should not need to be adjusted.
Speed Proportional Gain (KVPROP)
This gain will speed up the response and but excessive values will cause overshoot, and possible
inst ability.
Speed Integral Gain (KVINT)
Increasing the value of KVINT increases the low frequency gain and stiffness of the control, but
excessive values will cause overshoot for transient speed commands and may lead to oscillation.
If KVPROP and KVINT are set too high, an overshoot condition can also occur.
Speed differential gain (KVDIFF)
Theoretically this gain has a damping effect, although it is not implemented in the MintDrive.
For a full description of the tuning parameters, see Appendix A.