



















54
0
2
8
2
8
0
2
8
2
8
0
2
8
2
8
Układ czujnika obecności kierowcy i układ cofania
Układ czujnika obecności kierowcy i układ cofania
(ROS)
(ROS)
Upewnij się, czy czujnik obecności kierowcy i układ cofania (ROS)
pracują poprawnie. Jeśli twój traktor nie działa tak, jak to opisano,
należy natychmiast naprawić usterkę.
• Silnik powinien uruchamiać się tylko w przypadku, gdy pedał
hamulca jest całkowicie wciśnięty i gdy sprzęgło zespołu
roboczego jest odłączone.
SPRAWDZENIE CZUJNIKA OBECNOŚCI KIEROWCY:
• Podczas pracy silnika każda próba opuszczenia siedzenia przez
kierowcę, bez uprzedniego zaciągnięcia hamulca ręcznego,
powinna spowodować wyłączenie silnika.
• Podczas pracy silnika, gdy sprzęgło zespołu roboczego jest
włączone, każda próba opuszczenia siedzenia przez kierowcę
powinna spowodować wyłączenie silnika.
• Sprzęgło zespołu roboczego powinno działać tyko wtedy, gdy
kierowca zajął miejsce na siedzeniu.
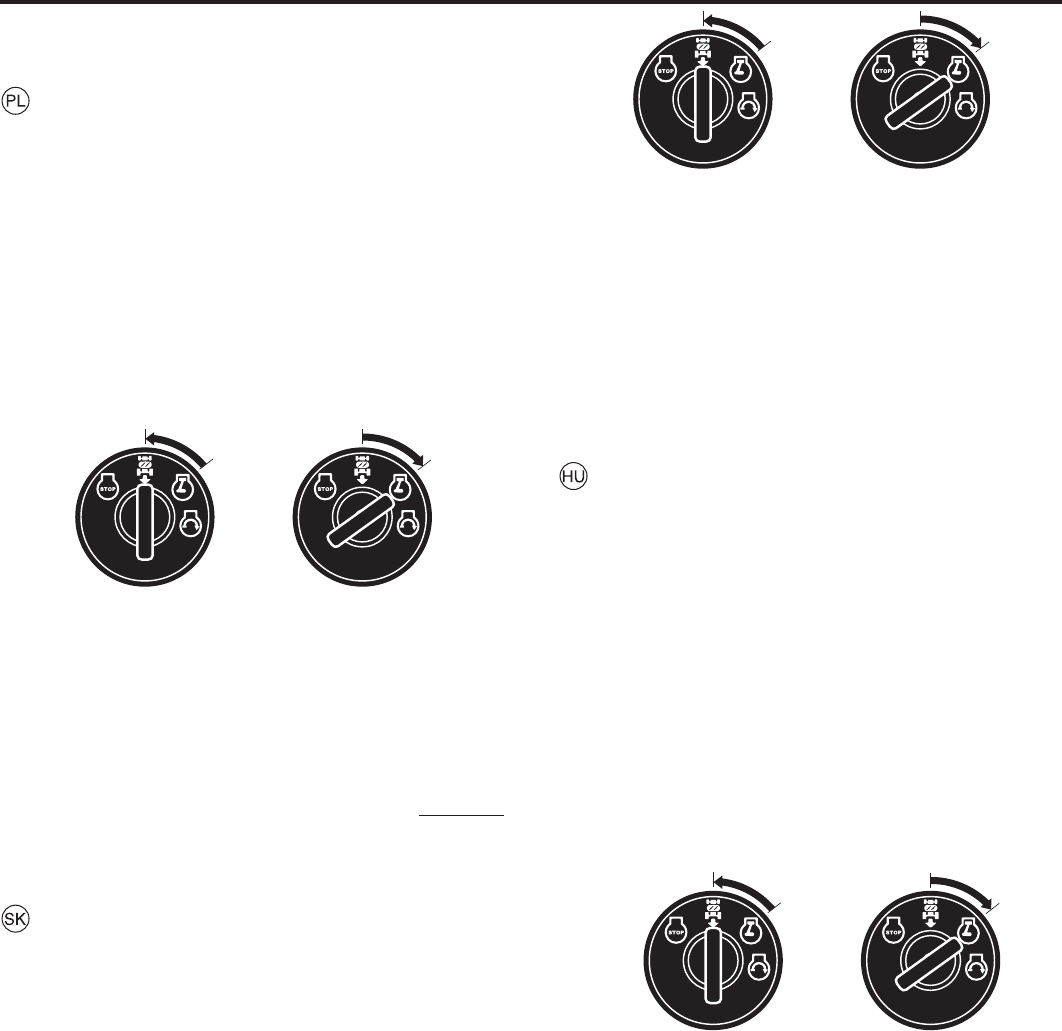
SPRAWDZENIE UKŁADU COFANIA (ROS):
• Podczas pracy silnika, gdy kluczyk zapłonu znajduje się w
pozycji „silnik włączony” i gdy sprzęgło zespołu roboczego
jest włączone, każda próba wrzucenia przez kierowcę biegu
wstecznego, powinna spowodować wyłączenie silnika.
• Podczas pracy silnika, gdy kluczyk zapłonu znajduje się w pozycji
ROS włączony i gdy sprzęgło zespołu roboczego jest włączone,
próba wrzucenia przez kierowcę biegu wstecznego, nie powinna
spowodować wyłączenia silnika.
Systém kontroly prítomnosti operátora a
systém pre prevádzku pri spätnom chode
(ROS)
Presvedčite sa, že systém kontroly prítomnosti operátora a
systém pre prevádzku pri spätnom chode správne fungujú.
Ak váš traktor nefunguje, ako je vyššie popísané, okamžite
ho opravte.
• Motor sa nesmie dať naštartovať, ak nie plne stlačený
brzdový pedál a spojka pre pripojenie prídavného
zariadenia nie je rozpojená.
KONTROLA SYSTÉMU KONTROLY PRÍTOMNOSTI
OPERÁTORA:
• Každý pokus operátora opustiť stroj pri bežiacom motore
bez zatiahnutia parkovacej brzdy musí viesť k vypnutiu
motora.
• Ak motor beží a spojka pre pripojenie prídavného
zariadenia je zapojená, operátor nemôže opustiť stroj
bez toho, aby sa nevypol motor.
• Spojka pre pripojenie prídavného zariadenia sa dá
prestaviť iba ak operátor sedí na sedadle.
KONTROLA SYSTÉMU PRE PREVÁDZKU PRI SPÄTNOM
CHODE (ROS):
• Ak motor beží a kľúčik je v polohe motor “ON” so zapojenou
spojkou pre pripojenie prídavného zariadenia, každý pokus
zaradiť spiatočku musí viesť k vypnutiu motora.
• Ak motor beží a kľúčik je polohe ROS “ON” so zapojenou
spojkou pre pripojenie prídavného zariadenia, každý pokus
zaradiť spiatočku NESMIE viesť k vypnutiu motora.
Kezelő jelenlétét fi gyelő rendszer és Hátrame-
neti működési rendszer (ROS)
Ellenőrizze, hogy a kezelő jelenlétét fi gyelő rendszer és a
hátrameneti működési rendszer megfelelően működik-e.
Ha a traktor nem a leírtak szerint működik, azonnal hárítsa
el a hibát.
• Teljesen benyomott fékpedál mellett a motornak nem
szabad elindulnia, és a tartozék tengelykapcsolójának
kikapcsolva kell lennie.
A KEZELŐ JELENLÉTÉT FIGYELŐ RENDSZER
ELLENŐRZÉSE
• Működő motor mellett ha a kezelő megkísérli a kézifék
behúzása nélkül elhagyni a gépet, a motor leáll.
• Működő motor és a tartozék aktivált tengelykapcsolója
mellett ha a kezelő megkísérli a kézifék behúzása nélkül
elhagyni a gépet, a motor leáll.
• A tartozék tengelykapcsolójának csak akkor szabad
működnie, ha a kezelő a vezetői székben ül.
HÁTRAMENETI MŰKÖDÉSI RENDSZER (ROS)
ELLENŐRZÉSE
• Ha a motor működik és a gyújtáskapcsoló Engine „ON”
(motor be) helyzetben van, valamint a tartozék tenge-
lykapcsolója aktivált, a kezelő bármilyen hátrameneti
kísérletére a motor azonnal leáll.
• Ha a motor működik és a gyújtáskapcsoló ROS „ON”
(motor be) helyzetben van, valamint a tartozék tenge-
lykapcsolója aktivált, a kezelő bármilyen hátrameneti
kísérletére a motor azonnal leáll.
6